
MECHANICKÉ ZÁVORY typu PZM-1
Rozhodl jsem se pro realizaci funkčních mechanických závor, které byly v minulosti hojně užívány k zabezpečení úrovňových železničních přejezdů. Při prohlížení nabídek obchodů se mi nejvíce zamlouvaly závory od německého výrobce Viessmann, katalogové číslo 5100. Ovšem cena tohoto výrobku je vysoká a podle zkušeností kolegů pohon používaný u závor později ztrácí schopnost pomalého pohybu. Odložil jsem tedy nákup závor na neurčito.

Mechanické závory Viessmann 5100
O pár týdnů později jsem se vydal na pražskou burzu, kde se mi šťastnou náhodou podařilo zakoupit nefunkční, ale jinak nepoškozené závory Viessmann za zlomek toho, co by stály nové závory, které jsem si před nějakým časem vyhlédl na internetu. Stačilo pouze vymyslet nějaký vhodný pohon.
Konstrukce pohonu
Rozhodl jsem se pro podobnou konstrukci pohonu, jakou jsem použil u přejezdového zabezpečovacího zařízení AŽD71 se závorami.
Použil jsem stejnosměrný motor s převodovkou, na jehož hřídel jsem nalisoval ozubené kolečko ze stavebnice MERKUR. To otáčí ozubeným kolečkem, které je umístěno na hřídeli. Výsledná rychlost otáčení je cca 8 ot./min. Zvedání či spouštění závor trvá, bez předzváněcí doby, přibližně 6 sec.
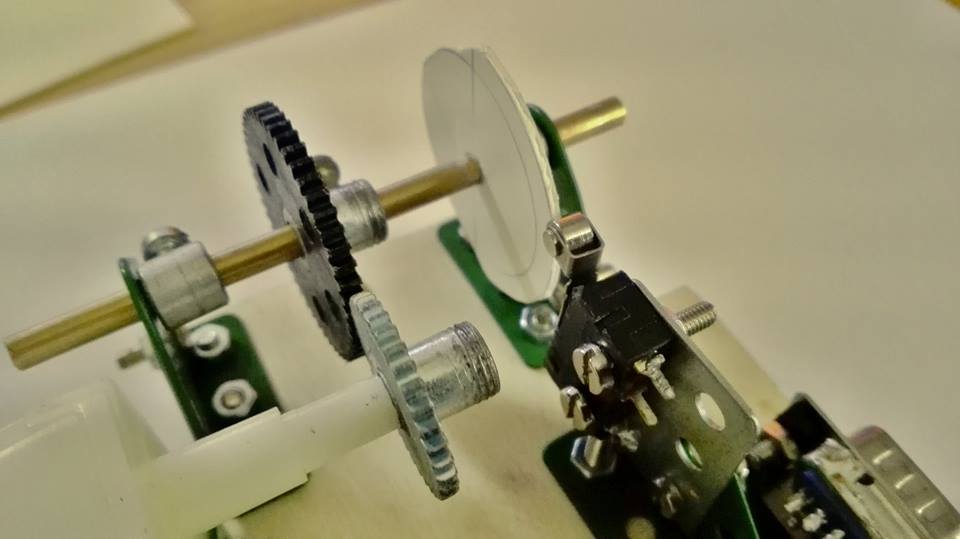
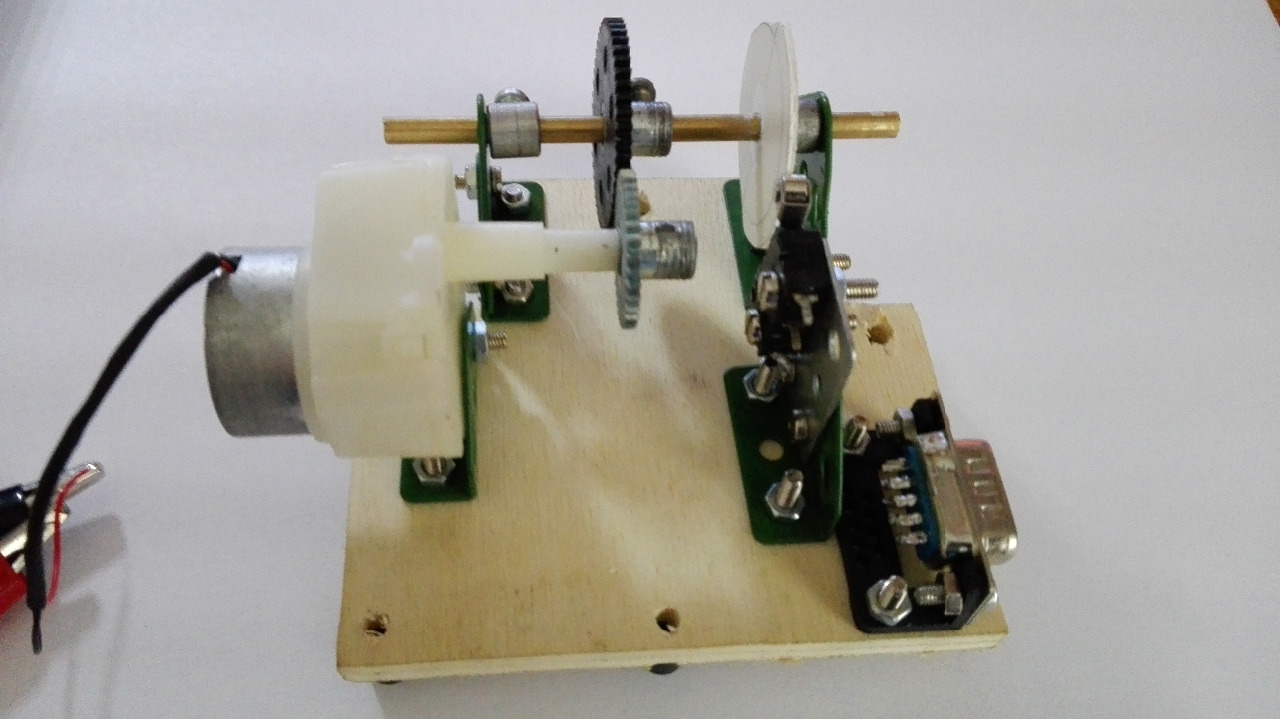
Pohon závor
Stejně jako u PZZ AŽD71 je každá závora vybavena táhlem z měděného drátu o průměru 0,4mm, který je vytvarován do tvaru jasného z fotografií a je zasunut do bužírky, která je umístěna na koncích hřídele. Otočením hřídele o 180° dojde k posunu táhla o 4mm, tedy o průměr hřídele a tloušťku stěny bužírky, což má za následek pohyb břevna závory.

Nákres táhel závor

Závory po instalaci táhel
Řídící elektronika
Řídící elektronika byla navržena tak, aby co nejvěrněji napodobovala chování reálného přejezdového zabezpečovacího zařízení tohoto typu. Schéma řídícího obvodu je velmi jednoduché a využívá pouze 3 relé.
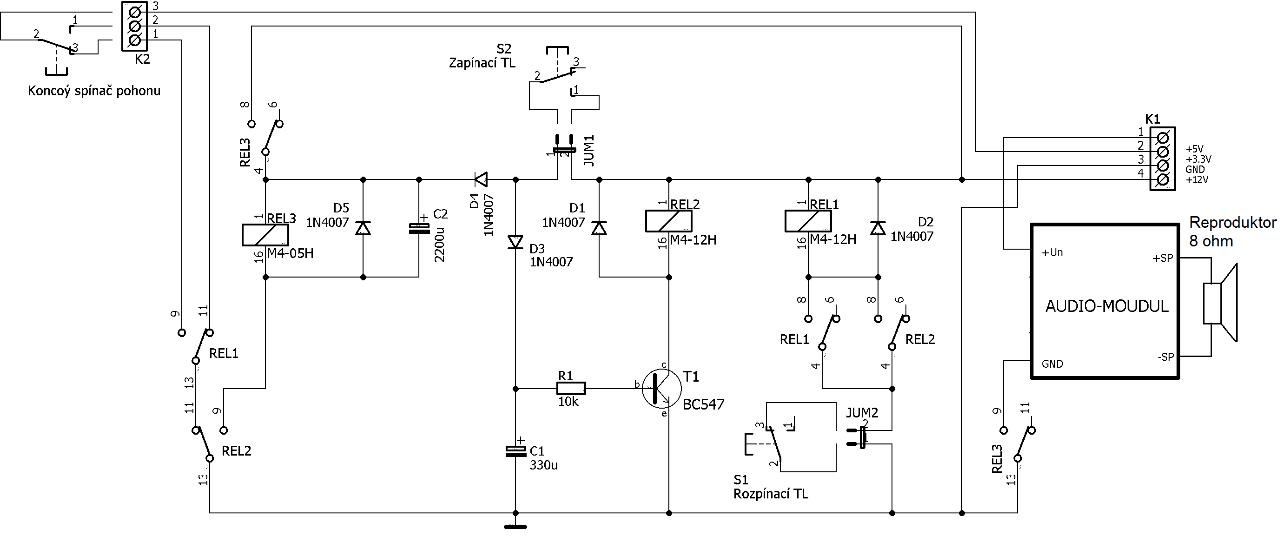
Schéma zapojení
Celé zařízení je ovládáno pomocí dvou tlačítek. Po stisku tlačítka S2 se nabije kondenzátor C1 a následně se začne vybíjet přes rezistor R1 do báze tranzistoru T1, relé REL2 se sepne. Díky sepnutému kontaktu relé REL2 se přitáhne relé REL1 a zůstane přitažené přídržnému kontaktu REL1. Zároveň se stiskem tlačítka S2 se sepne také relé REL3 a zůstane přitažené i po uvolnění tlačítka díky kontaktu REL3 (kontakt REL2 je přepnut - relé může sepnout). Kontakt relé REL3 spíná napětí pro audio modul, který zajišťuje akustickou signalizaci během předzváněcí doby.
Po uplynutí předzváněcí doby, jejíž délka je dána velikostí kondenzátoru C1, odpadne relé REL2, což způsobí přivedení napětí na přepínací kontakt REL1, který tvoří, spolu s přepínacím kontaktem koncového spínače, klasické zapojení „schodišťového spínače“. Tento spínač je umístěn přímo na pohonu závor. Je spínán pomocí excentru - viz. obrázek. Zda je spínač sepnut či ne záleží na poloze excentru.
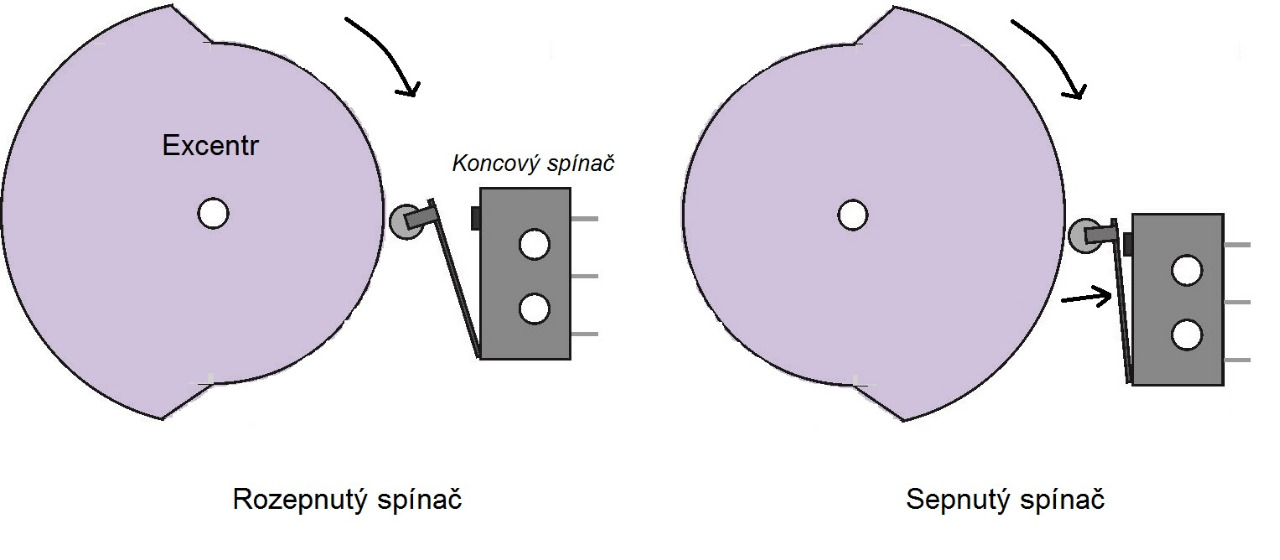
Excentr
Motor se roztočí, závory se sklápějí. Relé REL3 je nyní napájeno pouze s pomocí kondenzátoru C2 - zajišťuje zpožděné vypnutí relé REL3.
Po otočení excentru se přepne koncový spínač, motor je bez napětí, závory jsou sklopeny. Kondenzátor C2 je vybit, akustická signalizace je vypnuta.
Pro zvednutí břemen závor je nutné stisknout tlačítko S1. Po jeho stisknutí se přeruší přídržný obvod relé REL1, relé odpadá. Díky přepnutí kontaktu relé REL1 se dá motor do pohybu, zastaví se po přepnutí koncového spínače, tj. po otočení excentru o 180°.
Ještě se krátce zmíním o audio modulu. Jedná se o jednoduchý MP3 přehrávač, který využívá jako paměť USB disk. Zvuk je díky tomu velmi kvalitní a téměř nezkreslený. Já jsem jej ještě zesílil pomocí jednoduchého zesilovače, který pochází z počítačových reprobedýnek.

Fotografie použitého USB přehrávače
Funkci celého zařízení můžete vidět v následujícím videu
Pár slov závěrem
Stavba celého pohonu, včetně elektroniky, mi zabrala po večerech asi týden. Pohon je v principu velmi jednoduchý a na rozdíl od originálního pohonu spolehlivý. Jistou nevýhodou mohou být jeho rozměry. Na druhou stranu je díky němu pohyb závor velmi realistický, čemuž přispívá i akustická signalizace tvořená audio modulem. Pohyb závor záměrně není synchronní, jsou mezi sebou zpožděny. Určitě by bylo možné vyřešit řídící elektroniku jinak, bylo by možné použít např. hradla nebo MCU. Použitý systém je ovšem velmi názorný, v principu jednoduchý a hlavně funkční.

